PSB-5 will be launched from Bendigo on 16th November 2013.
We are sending away a Raspberry Pi with high-def Pi-Cam camera, interfacing to our standard tracker.

One main objective of the flight is to test HF tracking. DominoEX8 THOR4, JT65 and WSPR will be the three transmission protocols, beside the usual RTTY/SSDV on UHF.
DominoEX8 was chosen as one of the protocols to be tested on the flight, but initial tests showed that without Forward Error Correction (FEC), it was lagging far behind JT65, at least in our intended application of telemetry tracking on HF.
Thanks to a suggestion by Mark VK5QI, we replaced DominoEX8 with THOR4 at the last minutes, and that looks much better. THOR4 uses the same modulation scheme as DominoEX8 (incremental FSK) but with FEC.
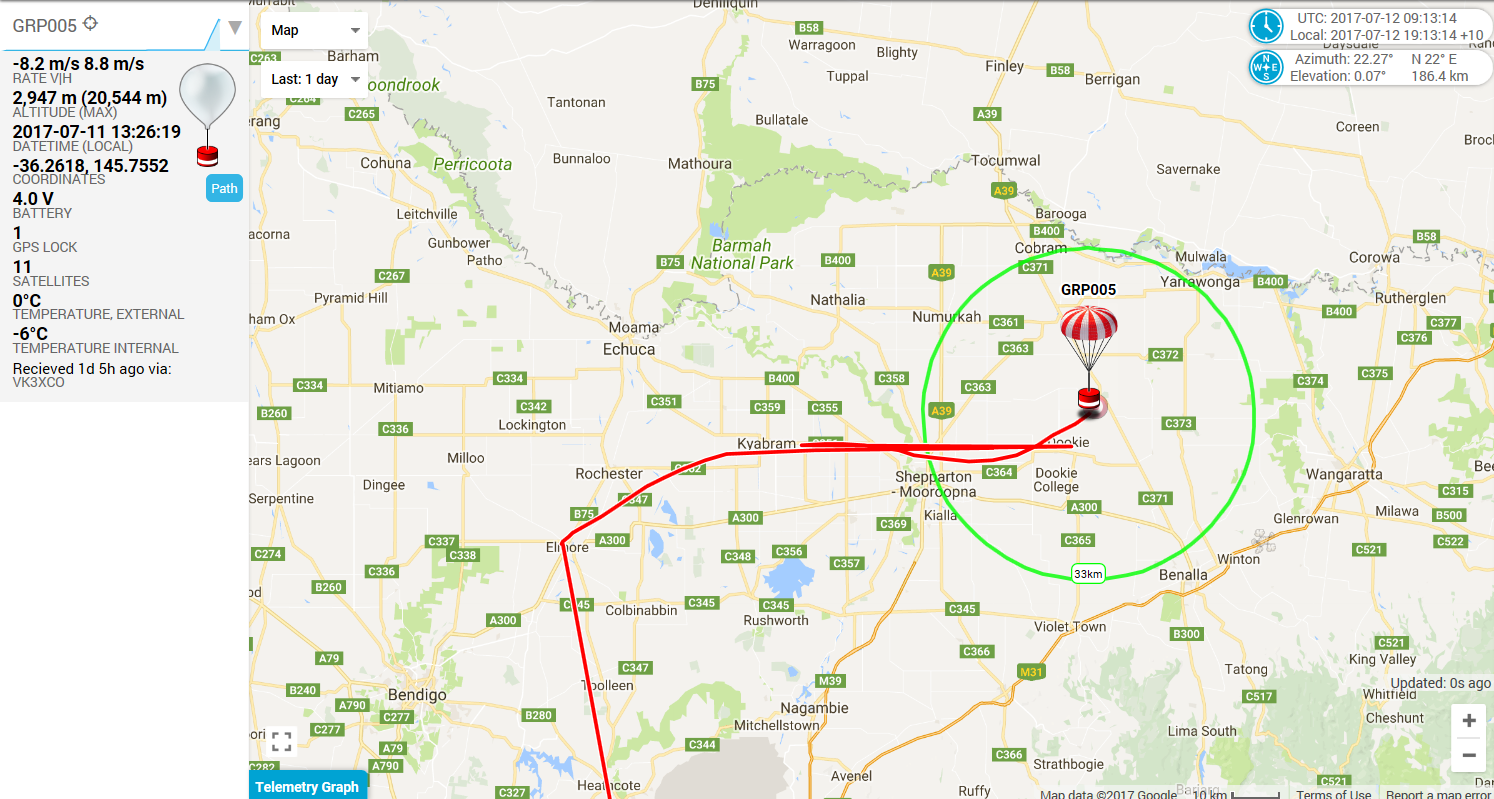
The predicted path should be something like this, but we will need to run the prediction closer to the date.

The payload will send back SSDV images and telemetry on UHF until it is beyond radio line-of-sight. After that HF will be the only way of getting telemetry from the payload, assuming we can keep it afloat until then 
To assist with tuning, the HF transmissions will be assigned different time slots, which are just the number of minutes in the hour.

Basically it is transmitting on 20m band in the first 20 minutes of the hour, 30m band in the second 20 minutes and 40m band in the last 20 minutes. Please note the JT65 frequencies are not standard JT65 QSO frequencies.
In each 20 minute interval there will be 8 minutes of THOR4, 8 minutes of JT65, and 4 minutes of WSPR.
On UHF it will be 434.650MHz, RTTY 300baud, 8 None 1, 450Hz shift.
dl-fldigi can be used to decode RTTY/SSDV and THOR4. The data format for THOR4 is the same as normal RTTY telemetry, ie. sentences with call sign, sequence number, time, coordinates, altitude, speed, satellites, GPS status and battery voltage as can be seen in this fldigi decode for DominoEX8.

Check here for instruction on RTTY/SSDV decoding: http://projectspaceballoon.net/ssd/
With JT65, we will need to use WSJTX software from Joe Taylor http://www.physics.princeton.edu/pulsar/K1JT/wsjtx.html
The existing JT65 protocol has a limitation of 13 characters per message, so our telemetry data will be sent as two JT65 packets:
Packet #1: VK3YT+Altitude(4 digits)+Satellite(2 digits)+Temperature(2 digits)
Packet #2: Lat+Long without decimal point+temperature sign (-/+)

In the screen capture, the two lines of test telemetry are:
VK3YT00110725 & -37480144846
This translates to:
- Altitude = 0011 * 100 = 1100m
- Number of Satellites = 07
- Temperature = 25C
- Lat = -37.480
- Long= 144.845
If you receive JT65 telemetry from the payload, please send a screen capture or the two lines to info@projectspaceballoon.net and we will manually upload that to spacenear.us. If JT65 proves to be viable for long range telemetry we will look at integrating the decoding software with spacenear.us
WSPR can be decoded using WSPR software http://physics.princeton.edu/pulsar/K1JT/wspr.html
You can check the WSPR spots (received transmissions from a WSPR beacon) here http://wsprnet.org/olddb.
WSPR propagation map can be found here http://wsprnet.org/drupal/wsprnet/map
When looking for the signals, the HF frequency should be quite accurate as that is GPS compensated. You will need to check the transmission timeslot table, and look for the signals either audibly or visually.
This is spectrum sample for a THOR4 signal.

This is spectrum sample for a JT65 signal. Note the very narrow bandwidth of less than 400Hz. Each JT65 transmission starts on the second second of the minute and completes in 46 seconds. Therefore time on the computer has to be accurate within 1 second of UTC time. Please consider syncing the time with internet time servers

Actual RF spectrum from the Pi after a LPF

Tracking data will be uploaded on the day to http://spacenear.us/tracker
Initial testing looks promising, this is a WSPR transmission received from the payload. The distance is 16,000km.